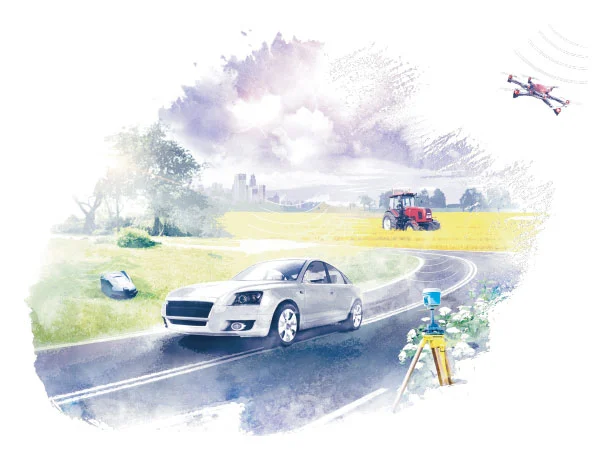
La solución Dual-RTK realiza el doble RTK de un solo tablero de doble Antena de posicionamiento y receptor de Rumbo (UM982). Hace uso completo de las señales de la antena maestra y la antena esclava en el receptor GNSS, inicia el algoritmo dual-RTK y se da cuenta de la salida del resultado de posicionamiento dual-RTK. Los dos RTK pueden comprobarse entre sí para mejorar la fiabilidad de posicionamiento. Después de que se habilite la solución Dual-RTK, el receptor GNSS emitirá dos resultados de posicionamiento RTK de alta precisión, claramente marcados como los resultados de posicionamiento RTK de la antena maestra o esclava. Esta tecnología mejorará la confiabilidad y mejorará la disponibilidad del receptor GNSS, especialmente en el trabajo real de la carretera y la granja. Cuando la señal de la antena principal está bloqueada, la antena principal no puede producir el resultado de posicionamiento RTK de alta precisión, pero la antena esclava aún puede hacer la solución de posicionamiento RTK, proporcionando información confiable de la posición de la alta precisión para el UAV, la maquinaria agrícola automática de la agricultura de la precisión, y los robots al aire libre etc.
 EN
EN  JP
JP  fr
fr  de
de  es
es  vi
vi  it
it  pt
pt  ms
ms  CN
CN